Active Localization of Gas Leaks using Fluid Simulation
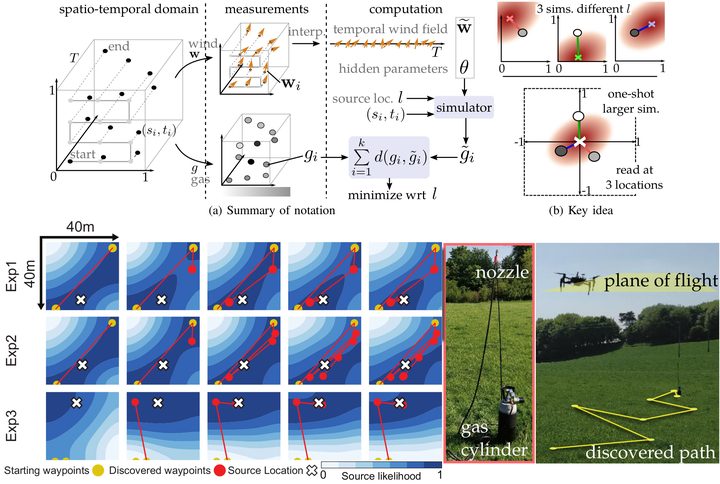 Image credit:
Unsplash
Image credit:
Unsplash
Abstract
Sensors are routinely mounted on robots to acquirevarious forms of measurements in spatiotemporal fields. Locating features within these fields and reconstruction (mapping) of thedense fields can be challenging in resource-constrained situations,such as when trying to locate the source of a gas leak from a smallnumber of measurements…
Type
Publication
In IEEE Robotics and Automation Letter, Vol.4, No.2. Presented at the IEEE International Conference on Robotics and Automation (ICRA)