 Image credit:
Unsplash
Image credit:
Unsplash
Abstract
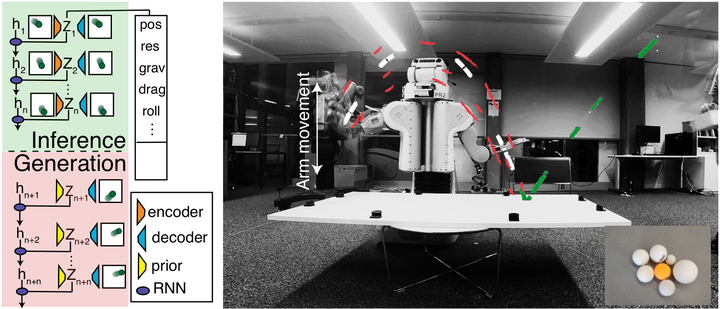
Robots performing tasks in dynamic environments would benefit greatly from understanding the underlying environment motion, in order to make future predictions and to synthesize effective control policies that use this inductive bias. Online system identification is therefore a fundamental requirement for robust autonomous agents…
Type
Publication
In IEEE Robotics and Automation Letters