Martin Asenov
PhD Candidate
The University of Edinburgh
Biography
I am a Senior Machine Learning Engineer at Huawei Technologies Research & Development, supervised by Prof. Adam Barker. Prior to that I was a Machine Learning Engineer at Hyperscience.
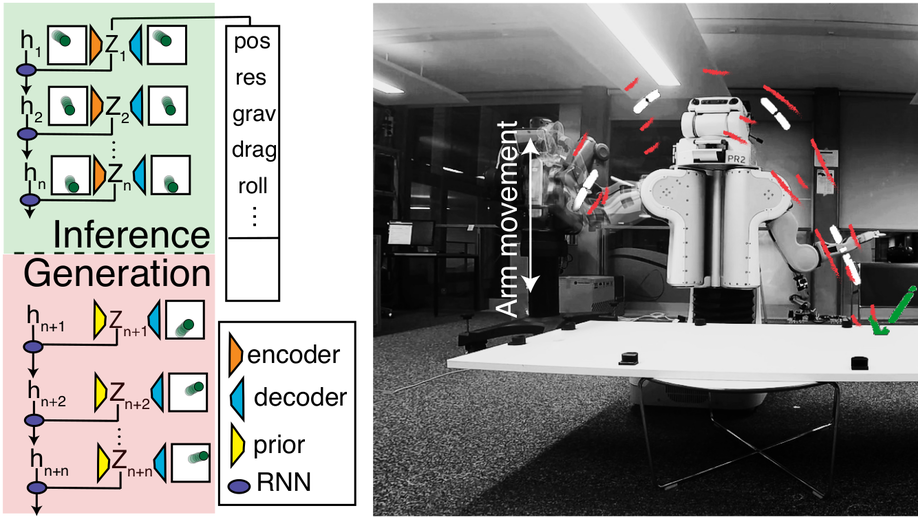
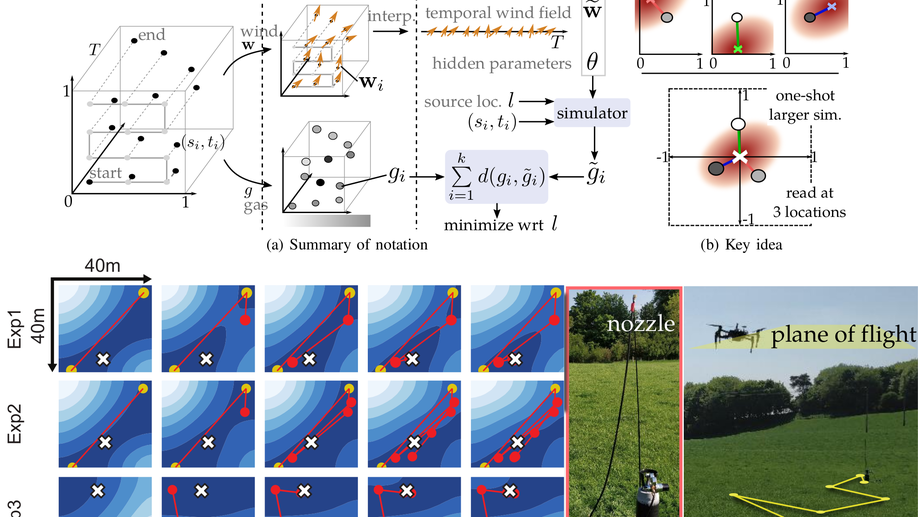
I completed my PhD at The University of Edinburgh and Heriot-Watt University, part of the RAD group, supervised by Dr. Subramanian Ramamoorthy and Dr. Kartic Subr. I am working on the intersection of Robotics, Machine Learning and Physics, i.e. how can we solve highly dynamical tasks in uncertain environments by incorporating physical inductive bias. This allows for performing tasks such as localizing a gas leakage with a UAV, stopping an unknown bouncing ball mid-air, etc., by incorporating useful bias for wind and gas dispersion; free fall and restitution; etc. I am also a committee member of EdIntelligence and cohort representative for the Robotics RAS CDT.
Interests
- Active Sensing
- Bayesian Optimization
- Machine Learning
- Robotics
- Intuitive Physics
- Computer Graphics
Education
-
PhD in Robotics and Autonomous Systems
The University of Edinburgh and Heriot-Watt University
-
MRes in Robotics and Autonomous Systems, 2017
The University of Edinburgh and Heriot-Watt University
-
BSc in Artificial Intelligence and Computer Science, 2016
The University of Edinburgh
-
Exchange Student, 2015
The University of California, Irvine
 Senior Machine Learning Engineer
Senior Machine Learning Engineer Research Scientist
Research Scientist